一、能力价值
1.1 痛点与背景
在团队日常协作中,知识沉淀是一个长期难题:
- 📬 邮件黑洞:大量有价值的技术方案、审批结论、外部对接信息沉没在邮箱中,难以被团队检索和复用
- 💬 群聊即逝:企微群中分享的最佳实践、排障经验稍纵即逝,翻聊天记录成本极高
- ✍️ 录入门槛高:手动登录 iwiki → 创建文档 → 排版格式化,流程繁琐,导致"知道该记但懒得记"
- 🔍 知识孤岛:信息散落在邮件、群聊、个人笔记中,团队无法共享
1.2 核心价值
本系统通过自动化知识采集,将团队知识沉淀成本降至零:
| 能力 | 价值 |
|---|---|
| 邮件自动同步 | 配置即生效,新邮件自动变 iwiki 文档,0 人工干预 |
| 群聊一键录入 | 在群里@机器人发消息,3 秒完成知识录入 |
| AI 智能提取 | 自动从碎片化内容中提取标题、整理格式、打标签 |
| 图文完整保留 | base64 图片自动上传 CDN,图文混排结构完整保留 |
| 多账号/多群 | 配置驱动,一套代码服务多个邮箱、多个企微群、多个 iwiki 空间 |
| 实时通知 | 录入完成后自动发送企微群通知,团队成员及时感知新知识 |
1.3 为什么需要团队知识库
知识管理的复利效应
团队知识库不是"锦上添花",而是一个具有复利效应的基础设施:
- 📈 知识复利:每一篇文档都是团队资产。今天沉淀的一篇排障经验,可能在未来半年内帮助 10 个人各节省 2 小时,ROI 远超想象
- 🧠 降低团队 Bus Factor:关键知识不再只存在于某个人的脑中或邮箱里,人员变动时团队能力不会断崖式下降
- 🔍 从"问人"到"搜索":新人入职、跨团队协作时,第一反应从"找谁问"变为"搜一下",极大降低沟通成本
- 🤖 AI 时代的数据底座:结构化的知识库天然适合作为 RAG(检索增强生成)的数据源,为团队 AI 助手提供高质量私域语料
自动化录入 vs 手动录入
| 维度 | 手动录入 | 自动化录入(本系统) |
|---|---|---|
| 录入成本 | 10-30 分钟/篇(登录→创建→排版→发布) | 0 分钟(邮件自动)/ 3 秒(群聊@机器人) |
| 录入率 | < 10%(大量知识因"懒得记"而流失) | > 90%(自动采集,几乎无遗漏) |
| 格式质量 | 参差不齐,依赖个人排版习惯 | AI 统一整理,格式规范一致 |
| 图片处理 | 手动上传,经常丢图 | 自动上传 CDN,图文完整保留 |
| 时效性 | 滞后数小时到数天 | 实时(邮件秒级同步,群聊 3 秒内完成) |
| 可持续性 | 依赖人的自觉,难以持续 | 系统自动运行,7×24 不间断 |
💡 核心洞察:知识沉淀最大的敌人不是"不想记",而是"录入成本太高"。将录入成本降至零,知识沉淀就会自然发生。
1.4 典型应用场景
场景一:外部合作邮件自动归档
产品同学收到合作方邮件 → 系统自动同步到 iwiki → 团队群收到通知 → 全员可查阅
场景二:群聊知识快速沉淀
开发同学在群里分享排障经验 → @知识助手 → AI 整理为结构化文档 → 录入 iwiki
场景三:会议纪要即时录入
会议结束后将纪要发到群里 → 指定标题后 @机器人 → 自动创建 iwiki 文档二、系统概述
本系统围绕"知识自动化录入"这一核心目标,提供了两条互补的知识采集链路:
- 邮件监听链路(
watchEmailAndSyncToIwiki):通过 IMAP IDLE 长连接实时监听邮箱,收到新邮件后自动提取内容、上传图片、创建 iwiki 文档、发送企微群通知。 - 企微机器人链路(
robot-knowledge-entry):通过企业微信机器人 webhook 接收群消息,经 AI 提取标题和标签后,创建 iwiki 文档并回复用户。
两条链路共享同一套 iwiki 文档创建和企微通知能力,最终汇聚到 iwiki 知识库中。
三、效果展示
3.1 邮件自动同步效果
Step 1 — 收到新邮件

Step 2 — 自动创建 iwiki 文档

Step 3 — 企微群收到通知

3.2 企微机器人知识录入效果
Step 1 — 群内/私聊发送图文消息

Step 2 — 机器人回复处理中

Step 3 — 录入成功通知

Step 4 — iwiki 文档效果

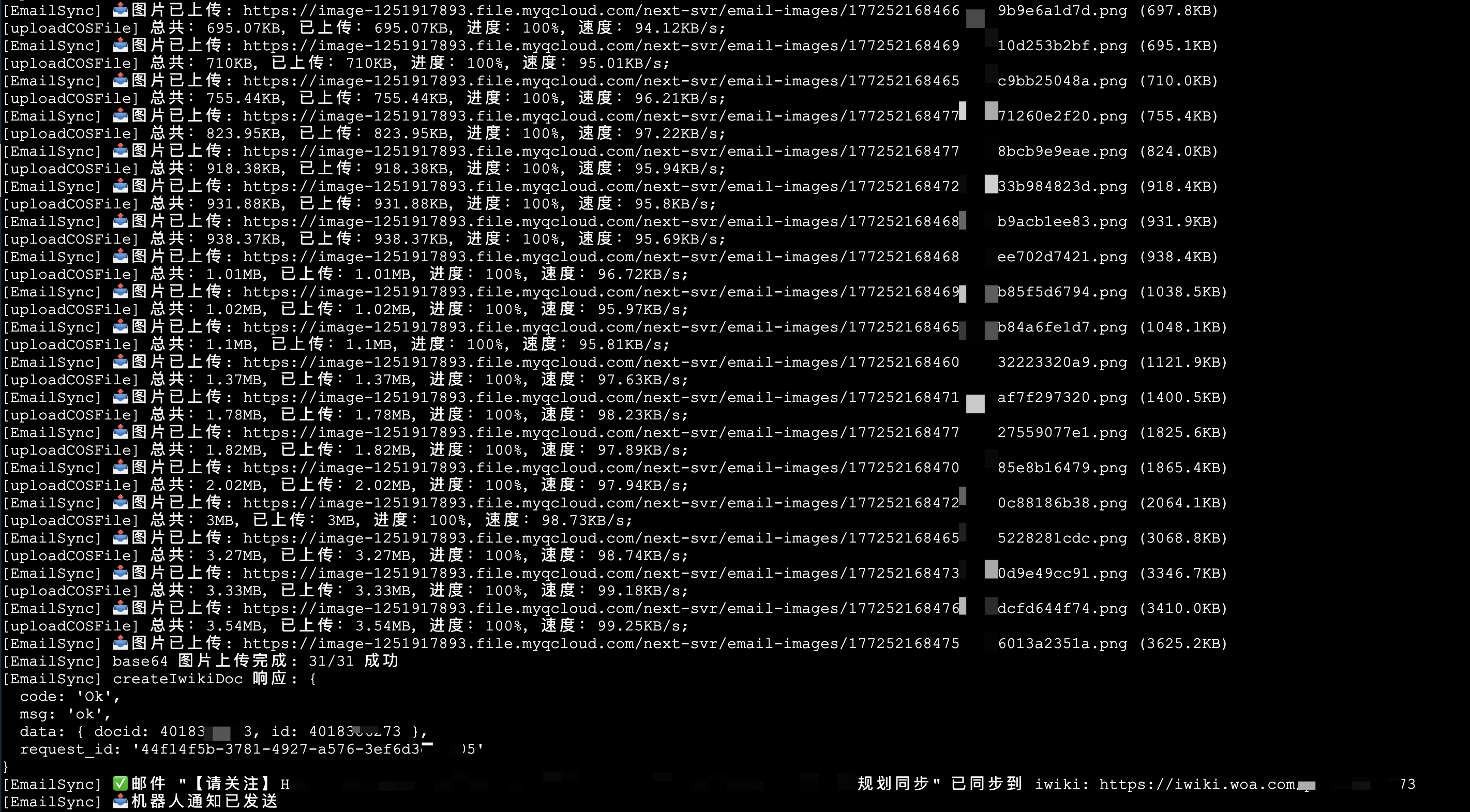
3.3 base64 图片自动上传 COS 效果
Before — 邮件原始内容含 base64 图片(内容过长无法上传)
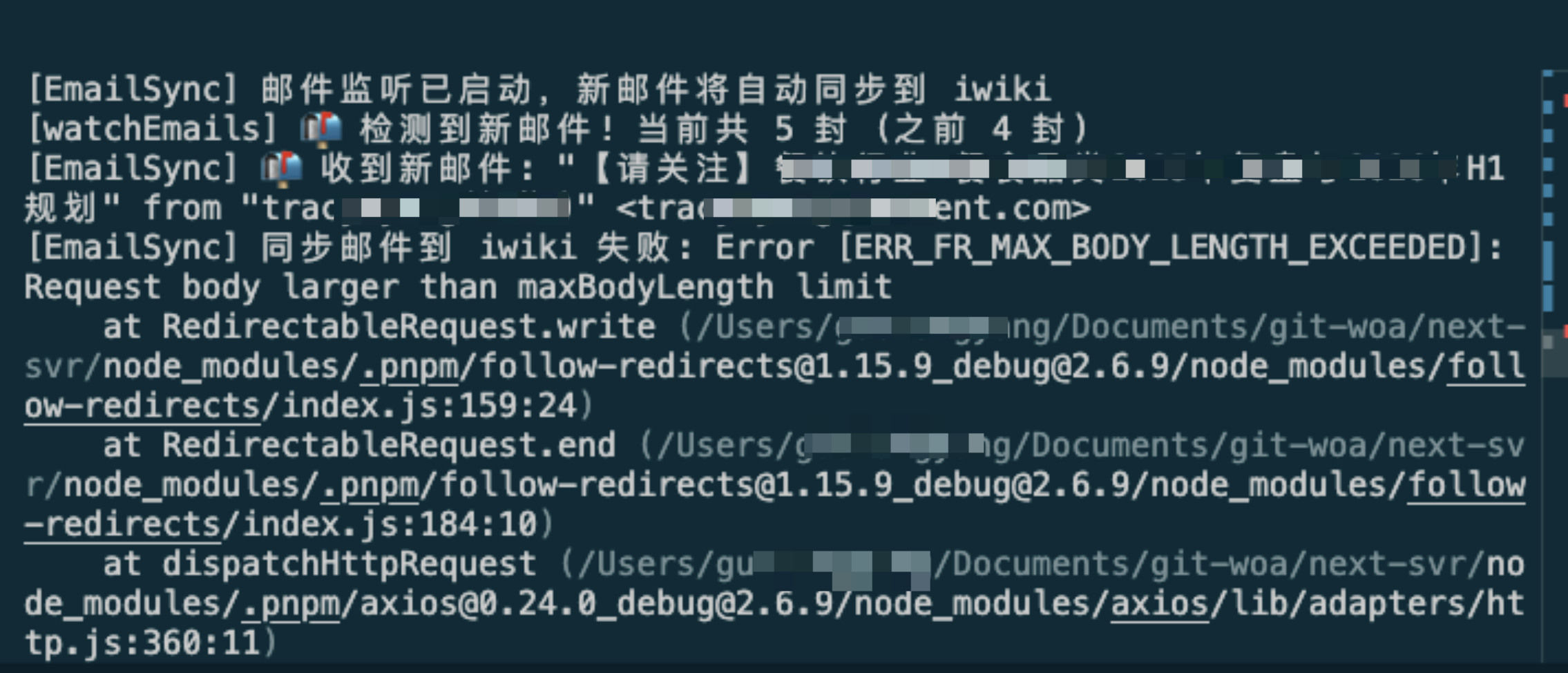
After — 自动替换为 CDN 地址(内容精简、图片正常显示)
四、模块架构
项目采用 三层分包架构,各层职责清晰:
| 层级 | 包名 | 职责 |
|---|---|---|
| 底层共享库 | plugin-light-shared | 提供通用能力:IMAP 邮件监听(watchEmails)、COS 配置获取(getUploadCosConfig)、CDN URL 转换(toCdnUrl)等 |
| 底层公共工具 | t-comm | 提供基础设施:iwiki 文档创建(createIwikiDoc)、企微机器人消息(batchSendWxRobotMarkdown)、COS 上传(uploadCOSStreamFile)、日志记录(saveJsonToLog) |
| 应用层 | next-admin-svr | 业务编排:邮件同步到 iwiki(watch-and-sync-iwiki.ts)、机器人知识录入路由(robot-knowledge-entry.ts) |
packages/
├── plugin-light-shared/src/
│ ├── email/
│ │ ├── index.ts # 导出 watchEmails 及相关类型
│ │ └── watch-unread.ts # IMAP IDLE 邮件监听核心实现
│ └── image/
│ └── image.ts # getUploadCosConfig / toCdnUrl
│
└── next-admin-svr/src/
├── index.ts # 模块导出入口
├── routes/
│ └── robot-knowledge-entry.ts # 企微机器人知识录入路由
└── utils/email/
└── watch-and-sync-iwiki.ts # 邮件监听 + 同步 iwiki五、链路一:邮件监听自动同步 iwiki
5.1 核心流程
5.2 底层:IMAP IDLE 邮件监听
源文件:
packages/plugin-light-shared/src/email/watch-unread.ts
watchEmails 是 plugin-light-shared 提供的通用邮件监听能力,基于 imapflow 实现:
核心设计:
export interface WatchEmailsOptions extends ImapConfig {
mailbox?: string; // 监听文件夹,默认 'INBOX'
onNewEmail: (email: EmailMessage) => void | Promise<void>;
onError?: (error: Error) => void;
onConnected?: () => void;
onDisconnected?: () => void;
autoReconnect?: boolean; // 默认 true
reconnectInterval?: number; // 默认 5000ms
maxReconnectAttempts?: number; // 默认 Infinity
}
export async function watchEmails(options: WatchEmailsOptions): Promise<EmailWatcher>;关键实现细节:
- IDLE 长连接:通过
ImapFlow的mailboxOpen打开邮箱后,自动进入 IDLE 模式,监听exists事件感知新邮件到达。 - 邮件解析:使用
mailparser.simpleParser解析 RFC822 原始邮件,使用TurndownService将 HTML 转 Markdown。 - 自动重连:内置指数退避重连机制(
reconnectInterval * reconnectAttempts,上限 60s),监听close事件触发。 - TLS 兼容:
tls.rejectUnauthorized = false兼容内网自签名证书;默认 143 端口使用 STARTTLS。
返回的 EmailMessage 结构:
export interface EmailMessage {
uid: number;
subject: string;
from: string;
to: string;
date: Date | undefined;
text: string | undefined;
html: string | false;
markdown: string; // HTML 自动转换的 Markdown
attachments: Array<{ filename: string; contentType: string; size: number }>;
}5.3 应用层:邮件同步到 iwiki
源文件:
packages/next-admin-svr/src/utils/email/watch-and-sync-iwiki.ts
5.3.1 配置驱动设计
整个同步流程通过三组独立配置驱动,全部支持外部覆盖:
// 邮箱连接配置
const EMAIL_CONFIG = {
host: 'imap.woa.com',
user: 'pmd_ai@tencent.com',
passwordEnvName: 'EMAIL_PASSWORD_PMD_AI', // 密码通过环境变量注入
};
// iwiki 目标配置
const IWIKI_CONFIG = {
urlPrefixInOA: 'http://api.sgw.woa.com/ebus/iwiki/prod/tencent/api',
iwikiUrlPrefix: 'https://iwiki.woa.com/p/',
spacekey: 'robotKnot',
parentDocId: 4018268655,
paasid: 'paasfront_fly_woa_com',
paasTokenEnvName: 'ROBOT_KNOWLEDGE_ENTRY_PASS_TOKEN',
};
// 通知机器人配置
const ROBOT_NOTIFY_CONFIG = {
webhookUrl: 'd55cd1c9-67c8-47e9-a4e0-d6ecdfecec22',
chatId: 'wrkSFfCgAAogAID57QZIlWyLeKV3gu8g',
};5.3.2 支持多账号监听
watchEmailAndSyncToIwiki 通过 options 参数实现配置合并,天然支持多次调用监听不同邮箱:
export async function watchEmailAndSyncToIwiki(
options: WatchEmailAndSyncToIwikiOptions = {}
) {
// 配置合并:外部传入的配置覆盖默认值
const mergedEmailConfig = { ...EMAIL_CONFIG, ...options.emailConfig };
const mergedIwikiConfig = { ...IWIKI_CONFIG, ...options.iwikiConfig };
const mergedRobotNotifyConfig = { ...ROBOT_NOTIFY_CONFIG, ...options.robotNotifyConfig };
// 密码从环境变量获取
const password = process.env[mergedEmailConfig.passwordEnvName];
// ...创建独立的 IMAP 连接
}多账号使用示例:
// 账号 A —— 使用默认配置
const watcherA = await watchEmailAndSyncToIwiki();
// 账号 B —— 同步到另一个 iwiki 空间,通知另一个群
const watcherB = await watchEmailAndSyncToIwiki({
emailConfig: {
user: 'another@tencent.com',
passwordEnvName: 'EMAIL_PASSWORD_ANOTHER',
},
iwikiConfig: {
spacekey: 'AnotherSpace',
parentDocId: 1234567890,
},
robotNotifyConfig: {
webhookUrl: 'another-webhook-key',
chatId: 'another-chat-id',
},
});
// 每个 watcher 独立管理生命周期
await watcherA?.stop();
await watcherB?.stop();每次调用创建完全独立的 IMAP 连接、配置上下文和 EmailWatcher 实例,互不干扰。
5.3.3 base64 图片自动上传 COS
邮件中嵌入的 base64 图片会导致文档内容过长,无法上传 iwiki。系统通过以下流程自动处理:
关键实现:
- 使用
getUploadCosConfig(cdn)自动获取 COS 密钥配置(来自plugin-light-const) - 使用
uploadCOSStreamFile上传 Buffer 到 COS - 使用
toCdnUrl将 COS URL 转为 CDN URL(域名映射) - 文件名格式:
next-svr/email-images/{timestamp}_{md5hash}.{ext} - 并发上传所有图片(
Promise.allSettled),单张失败不影响其他
六、链路二:企微机器人知识录入
源文件:
packages/next-admin-svr/src/routes/robot-knowledge-entry.ts
6.1 核心流程
6.2 配置驱动的多群支持
机器人路由通过 webhookKeyMap 实现一个接口服务多个群聊,每个 webhook key 映射到不同的 iwiki 空间:
const CONFIG = {
webhookKeyMap: {
'd55cd1c9-...': { // robotKnot 群
spacekey: 'robotKnot',
robotDocParentId: 4018268622,
},
'a6d0ea4a-...': { // IGameFrontDevPlat 群
spacekey: 'IGameFrontDevPlat',
robotDocParentId: 4018270476,
},
'b9efc7b0-...': { // PMDDEV 群
spacekey: 'PMDDEV',
robotDocParentId: 4018271242,
},
},
};收到消息时,通过 getConfigByWebhookKey(webhookUrl) 从 URL 中提取 key,自动路由到对应空间。未匹配时兜底使用第一个配置。
6.3 图文混排消息解析
企微机器人的 mixed_message 是图文混排格式,parseMixedMessage 按原始顺序将其转为 Markdown:
// 输入:mixed_message.msg_item 数组
[
{ msg_type: 'text', text: { content: '这是一段知识...' } },
{ msg_type: 'image', image: { url: 'https://...' } },
{ msg_type: 'text', text: { content: '继续说明...' } },
]
// 输出:保持图文穿插顺序的 Markdown
"这是一段知识...\n\n<img src=\"https://...\" width=\"900\" />\n\n继续说明..."支持的消息类型:text、image、file、video,以及单独的附件消息。
6.4 AI 标题提取
使用 @tencent-ai/agent-sdk 的 query 方法,调用 claude-opus-4.6 模型从碎片化内容中提取结构化知识:
const response = query({
prompt: `从以下用户输入中提取:
1. 简洁标题(不超过30字)
2. 整理后的 Markdown 内容
3. 1-5 个标签
返回 JSON: {title, content, tags}`,
options: {
model: 'claude-opus-4.6',
permissionMode: 'bypassPermissions',
},
});AI 不可用时,fallbackExtract 兜底:取首行内容作标题,剩余作正文。
用户也可以显式指定标题(优先级最高):
标题:xxx/标题:xxxtitle: xxx#标题#
七、共享能力层
7.1 iwiki 文档创建
两条链路共享同一个 createIwikiDoc 调用方式(来自 t-comm):
const res = await createIwikiDoc({
prefix: 'http://api.sgw.woa.com/ebus/iwiki/prod/tencent/api',
paasId: 'paasfront_fly_woa_com',
paasToken: process.env.ROBOT_KNOWLEDGE_ENTRY_PASS_TOKEN,
parentid: 4018268655, // 父文档 ID
spacekey: 'robotKnot', // iwiki 空间
bodymode: 'md', // Markdown 格式
title: '文档标题',
body: '文档正文 (Markdown)',
});
// res.data.id → 文档 ID → https://iwiki.woa.com/p/{id}7.2 企微机器人通知
两条链路都使用 batchSendWxRobotMarkdown(来自 t-comm)发送 Markdown 消息:
await batchSendWxRobotMarkdown({
content: '📬 **邮件知识已同步到 iwiki**\n...',
chatId: 'wrkSFfCgAAogAID57QZIlWyLeKV3gu8g',
webhookUrl: 'd55cd1c9-...',
isV2: true,
});7.3 COS 图片上传与 CDN 转换
源文件:
packages/plugin-light-shared/src/image/image.ts
getUploadCosConfig(cdnDomain)— 通过 CDN 域名反查 COS 配置(secretId/secretKey/bucket/region),数据源来自plugin-light-const的 CDN 列表toCdnUrl(cosUrl)— 将 COS 域名映射为 CDN 域名,支持https://、http://、//、纯域名等多种格式uploadCOSStreamFile({ file, key, ... })— 来自t-comm,将 Buffer 上传到 COS
八、配置与环境变量汇总
| 环境变量 | 用途 | 使用方 |
|---|---|---|
EMAIL_PASSWORD_PMD_AI | 默认邮箱密码 | 邮件监听 |
ROBOT_KNOWLEDGE_ENTRY_PASS_TOKEN | iwiki PaaS Token | 两条链路共用 |
WECOM_ROBOT_ENCODING_AES_KEY | 企微机器人验证密钥 | 机器人路由 |
CODEBUDDY_API_KEY | AI Agent SDK Key | 机器人 AI 提取 |
九、启动方式
在 packages/next-admin-svr/src/index.ts 中导出,由上层应用在服务启动时调用:
// 邮件监听(可多次调用监听不同邮箱)
export { watchEmailAndSyncToIwiki } from './utils/email/watch-and-sync-iwiki';
// 机器人路由(挂载到 Express)
export { default as robotKnowledgeEntryRouter } from './routes/robot-knowledge-entry';// 实际启动示例
import { watchEmailAndSyncToIwiki, robotKnowledgeEntryRouter } from 'next-admin-svr';
// 启动邮件监听
await watchEmailAndSyncToIwiki();
// 挂载机器人路由
app.use('/api/robot-knowledge', robotKnowledgeEntryRouter);十、两条链路对比
| 维度 | 邮件监听链路 | 企微机器人链路 |
|---|---|---|
| 触发方式 | IMAP IDLE 长连接,被动接收 | HTTP POST webhook,实时回调 |
| 内容来源 | 邮件(HTML/纯文本) | 企微消息(文本/图文混排/附件) |
| 标题生成 | 直接使用 email.subject | AI 提取 / 用户指定 / 兜底截取 |
| 图片处理 | base64 → COS → CDN URL | 企微自带图片 URL,直接内嵌 |
| 多目标支持 | 通过多次调用 + options 覆盖 | 通过 webhookKeyMap 路由映射 |
| 配置驱动 | EmailConfig + IwikiConfig + RobotNotifyConfig 三组配置合并 | CONFIG.webhookKeyMap 按 key 路由 |
| 可靠性 | 自动重连(指数退避,最大 60s) | 依赖企微平台重试机制 |
| 交互性 | 单向(监听 → 同步 → 通知) | 双向(接收消息 → 回复结果) |
十一、总结
本系统以**"零成本知识沉淀"**为目标,通过两条自动化链路(邮件监听 + 企微机器人)覆盖了团队日常最主要的信息流通渠道。核心设计亮点:
| 设计理念 | 体现 |
|---|---|
| 配置驱动 | 邮箱、iwiki 空间、通知群均可通过配置覆盖,新增接入方无需改代码 |
| 能力复用 | iwiki 创建、企微通知、COS 上传等下沉为共享层,两条链路复用 |
| 多租户隔离 | 多邮箱独立 IMAP 连接,多群通过 webhookKeyMap 路由,互不干扰 |
| 容错与可靠 | IMAP 指数退避重连、图片上传 Promise.allSettled 单张失败不阻塞、AI 提取兜底策略 |
| 开箱即用 | 邮件链路一行代码启动,机器人链路一行路由挂载,5 分钟完成接入 |
如需将该能力复用到其他团队,只需:
- 准备一个邮箱账号 / 创建一个企微机器人
- 在 iwiki 上创建目标空间和父文档
- 传入对应配置调用
watchEmailAndSyncToIwiki()或挂载robotKnowledgeEntryRouter